
A Surround View and Moving Object Detector System
This project was carried out in CyLab, Carnegie Mellon University and advised by Prof. Ragunathan “Raj” Rajkumar. The final objective is to build a system that can show the surround view of a vehicle and also detects moving objects based on the four fish-eye cameras on TI TDX2x and Nvidia TX1 platform.
Moving object detector - Nvidia TX1 platform
My role
- Implemented moving object detection with mono fisheye camera on Nvidia TX1 platform
- Evaluated the performance of OpenCV application and applied CUDA OpenCV to optimize the application
- Improved each frame’s processing time by 23.5% after optimization using CUDA
Details
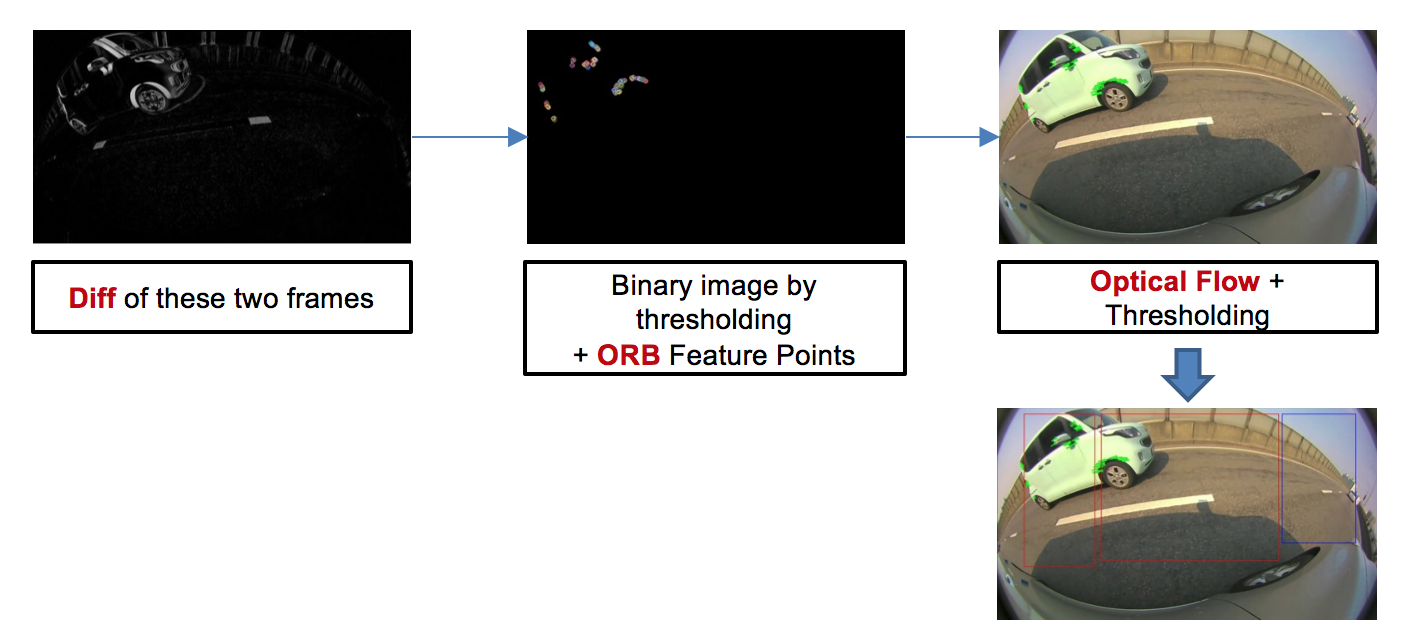 Figure 1. MOD algorithms details based on OpenCV
Figure 1. MOD algorithms details based on OpenCV
 Figure 2. MOD performance measure before optimization on Nvidia TX1 platform
Figure 2. MOD performance measure before optimization on Nvidia TX1 platform
 Figure 3. MOD performance measure after optimization for the same frame on Nvidia TX1 platform
Figure 3. MOD performance measure after optimization for the same frame on Nvidia TX1 platform
Test
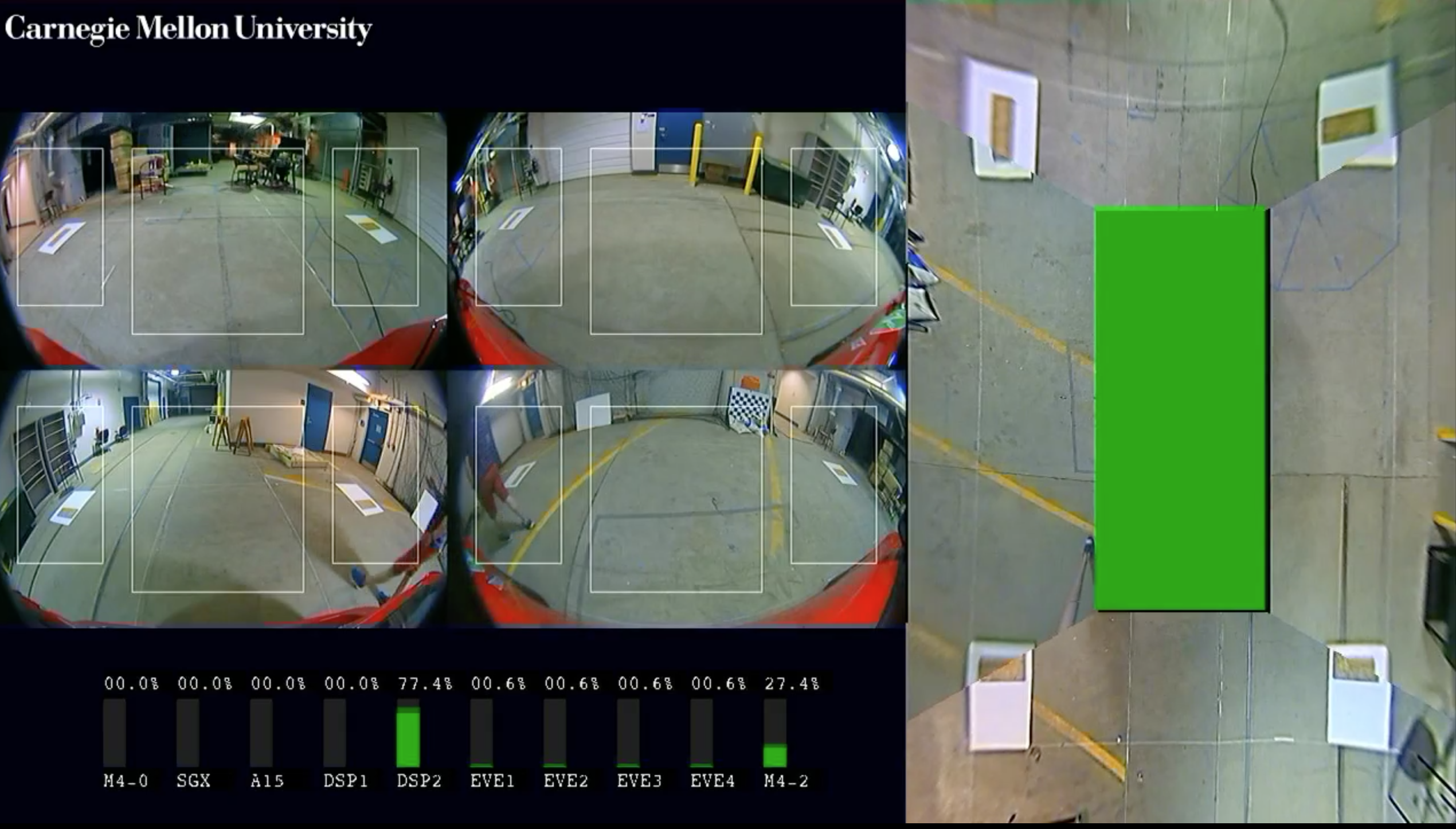
 Video 1. a brief video that is recorded using Quad-View on TI TDA2x platform and analyzed using Nvidia TX1 platform in the CMU garage [click the graph]
Video 1. a brief video that is recorded using Quad-View on TI TDA2x platform and analyzed using Nvidia TX1 platform in the CMU garage [click the graph]
 Video 2. a brief video that is recorded using Quad-View on TI TDA2x platform and analyzed using Nvidia TX1 platform
on the highway from Waterfront to Downtown in Pittsburgh, PA, USA [click the graph]
Video 2. a brief video that is recorded using Quad-View on TI TDA2x platform and analyzed using Nvidia TX1 platform
on the highway from Waterfront to Downtown in Pittsburgh, PA, USA [click the graph]
Surround view monitoring - TI TDA2x platform
My role
- Ported the MOD algorithm to TI TDA2x and help bring up surround view monitoring system with TI platform
- Applied prototype to test the built system, and then deploy the system to real car for further evaluation
- Do calibration based on the positions of vehicle and mounted cameras and live demo the whole system
Details
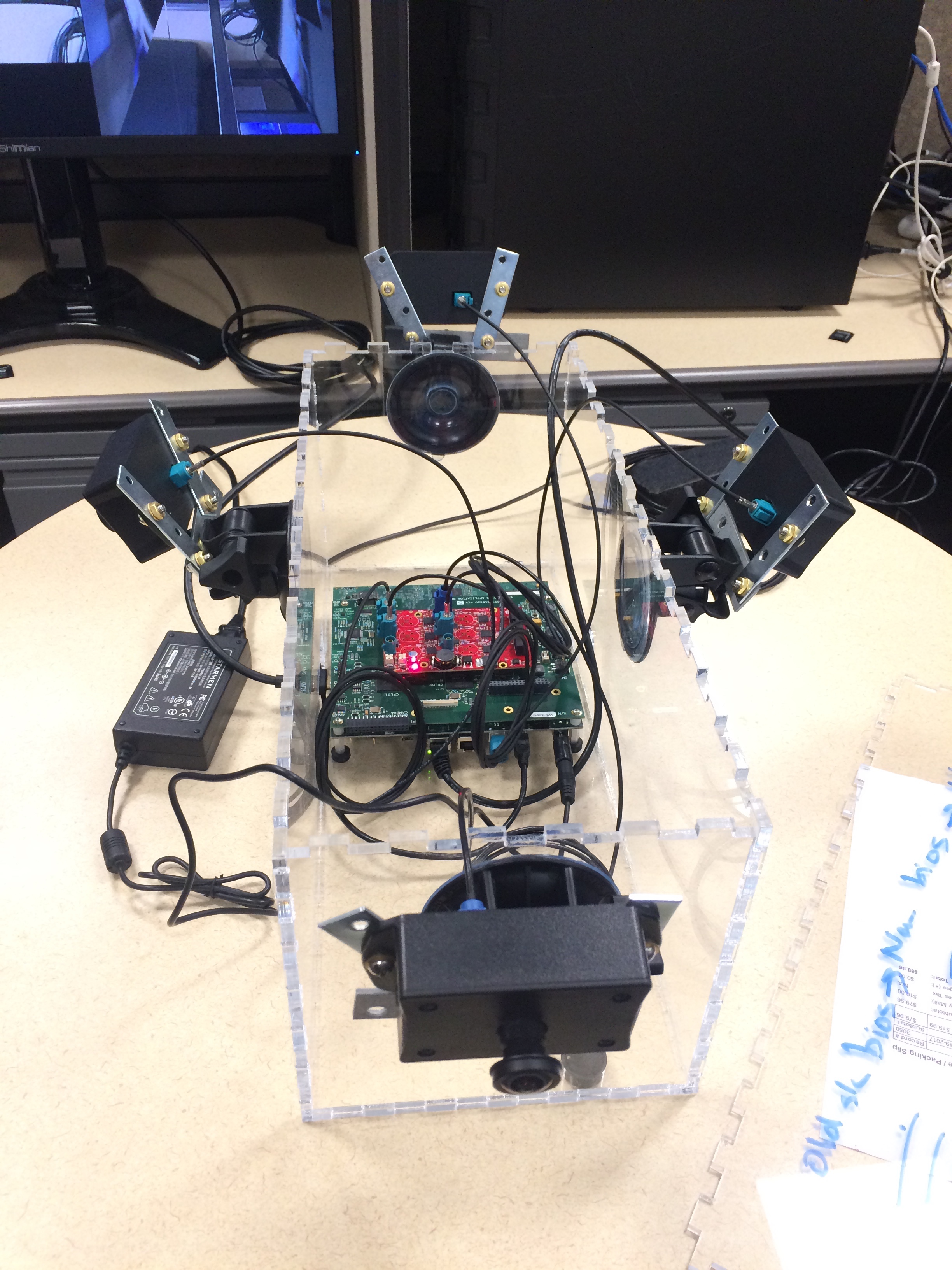 Figure 4. TI TDX2x prototype
Figure 4. TI TDX2x prototype
Calibration
We also verified the system we built using real-time recorded videos and evaluated the system performance.
 Figure 5. Surround View Calibration
Figure 5. Surround View Calibration
Live Demo
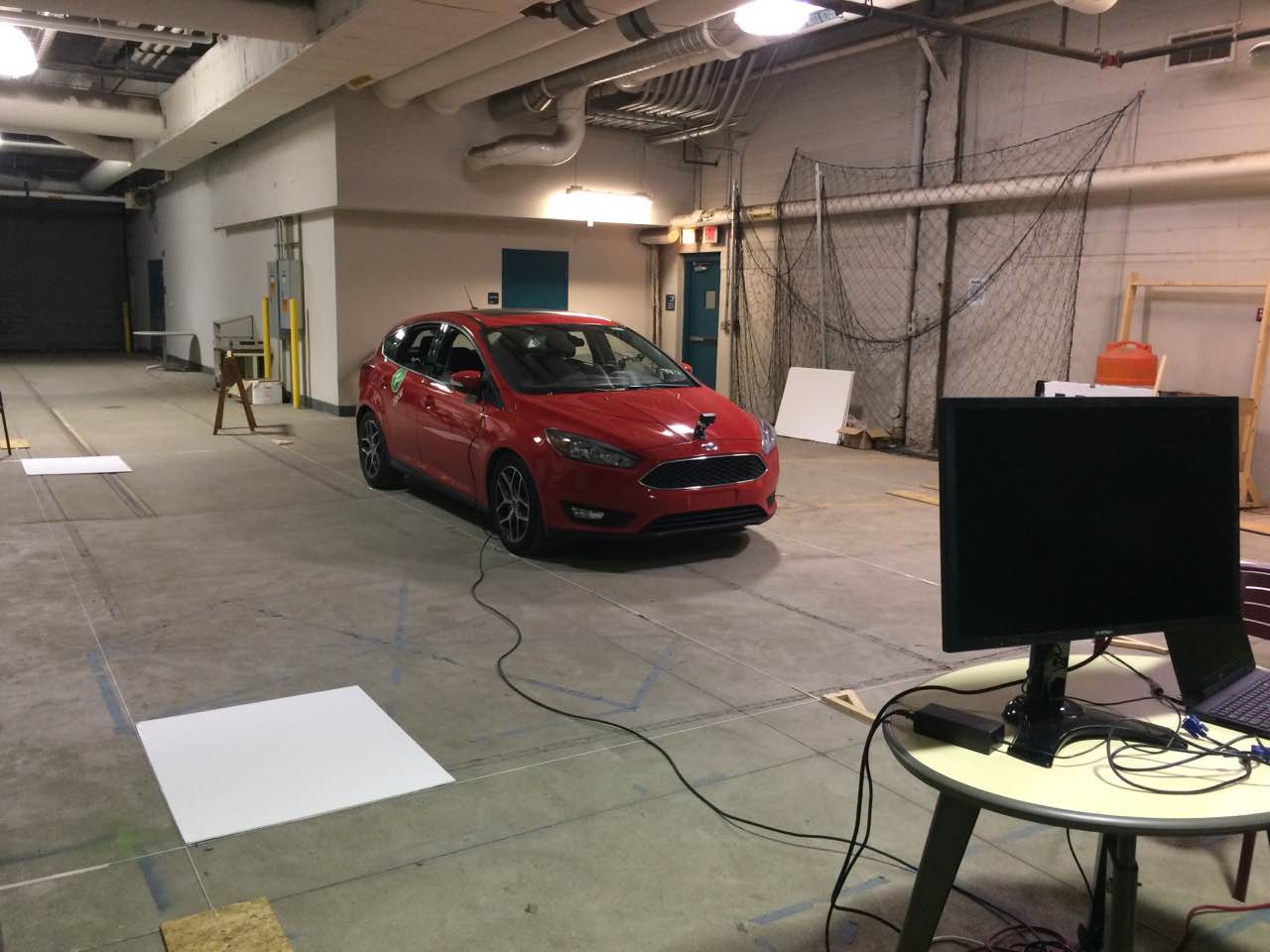 Figure 6. Live Demo Environment
Figure 6. Live Demo Environment
 Figure 7. Prof. Raj Rajkumar, Albert Davies and Me (from right to left)
Figure 7. Prof. Raj Rajkumar, Albert Davies and Me (from right to left)
 Video 3. A live demo video shows both MOD and Surround View algorithm integrated on the TI TDA2x platform [click the graph]
Video 3. A live demo video shows both MOD and Surround View algorithm integrated on the TI TDA2x platform [click the graph]